
K&J Magnetics Blog
Your source for magnet info and cool ways to use your magnets!
Browse All Articles
-
Magnetic Shielding Materials
Learn how magnetic shielding works, which materials are most effective, and how thickness affects a shield's ability to redirect magnetic fields.

-
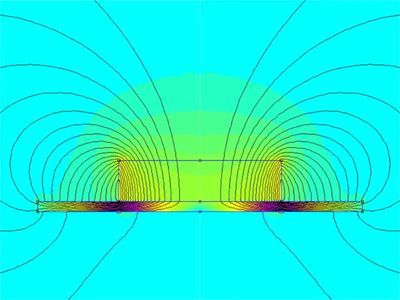
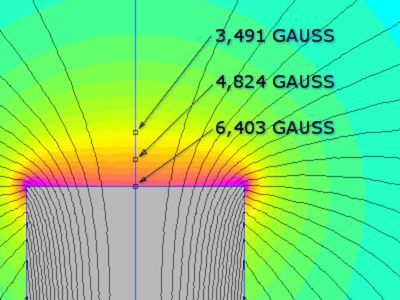
Surface Fields 101
Learn why a magnet's surface field depends more on its shape and thickness than its overall size, and why larger magnets can show lower surface field values.
-

Which Pole Is North?
Use simple tools like pole identifiers, marked magnets, or a compass to quickly determine which side of a magnet is its north or south pole.
-
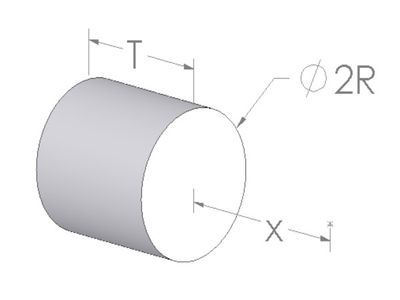
How Much Will a Magnet Hold?
How much weight can a magnet really hold - and why does it change so much depending on how you use it?
-

Sticky Business - How to Glue Neodymium Magnets
How to properly glue neodymium magnets, including surface preparation, adhesive choices, and common mistakes to avoid.
-

Magnetic Knife Holder
Learn how to build a magnetic knife holder using neodymium magnets, including magnet sizing, wood thickness considerations, and step-by-step construction tips.
-
Temperature and Neodymium Magnets
Understand how temperature affects neodymium magnets-why heat can weaken them, how shape changes their limits, and how special grades survive extreme environments.
-
Can you Wipe a Hard Drive Using Magnets?
See what happens when powerful neodymium magnets are used in an attempt to erase data from a hard drive-and why the results might surprise you.
-
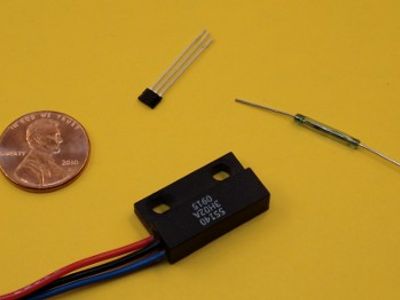
Reed Switches and Hall Effect Sensors
Learn how to choose magnets for reed switches and Hall effect sensors, including proper orientation, field strength, and real-world design tolerances.
-

Pacemaker Safety around Magnets
Examines how magnetic fields from neodymium magnets relate to pacemaker safety and how distance affects potential interference.
-

How to Sew Magnets into Fabric
Use sew-in magnets to create hidden magnetic clasps in clothing, bags, and accessories for a clean, quiet alternative to snaps or Velcro.
-
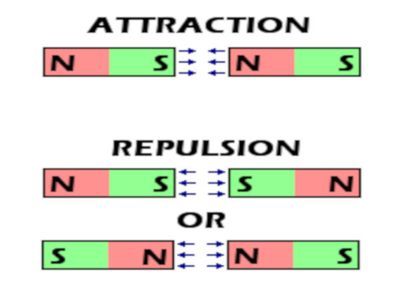
Magnet Basics
Learn the basics of how magnets work, why they attract or repel, how pull force is measured, and how to magnetize simple steel tools.
-
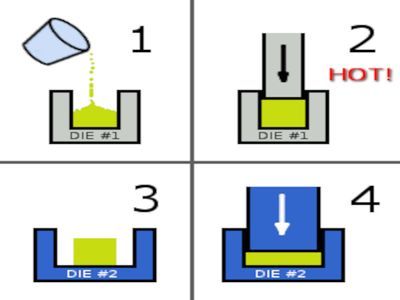
How Neodymium Magnets are Made
How are powerful neodymium magnets actually made?
-
Calculating Steel Thickness for Neodymium Magnets
Learn how steel plate thickness affects magnet pull force and why thin steel can significantly reduce holding strength.
-

Hanging Art on a Wall with Magnets
Learn several practical ways to hang artwork using magnets, including magnet-to-magnet mounts, magnetic sandwiches, and adhesive-backed magnets.
-

Magnetic Pole Climbing Robot
Magnets can help robots climb steel poles by creating enough magnetic pull and friction to prevent sliding or rotating while the robot moves upward.
-

Finding and Identifying Magnetic Meteorites
Discover how magnets help locate and identify meteorites, what types of magnets work best, and how to avoid damaging a meteorite's natural magnetic record while hunting.
-

Magnetic Paint
Magnetic paint can turn any wall into a magnet-friendly surface, but even strong magnets only stick lightly unless multiple coats are applied.
-

Magnetic Shake Flashlight
How can simply shaking a magnet through a coil generate enough electricity to power a flashlight?
-
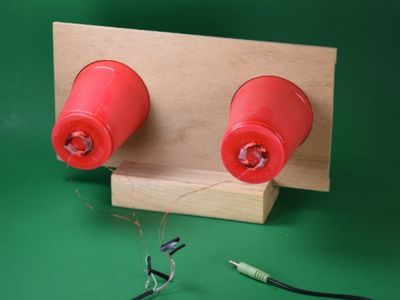
Making Speakers with Neodymium Magnets
How do speakers actually make sound? Discover how magnets power speakers and see how to build your own simple version.
-

Shipping Magnets: Essential Rules & Safety Guidelines
Learn how to safely ship powerful neodymium magnets by air and estimate their magnetic field without expensive equipment.
-

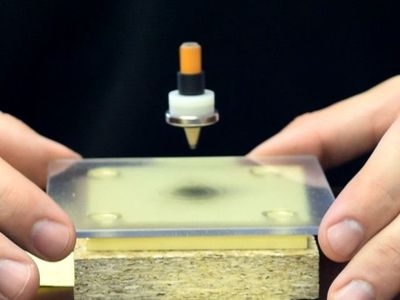
Diamagnetism and Levitation
Learn how diamagnetic materials like pyrolytic graphite can stabilize a floating magnet and enable simple magnetic levitation experiments.
-
Calculator to Measure Magnet Field Strength in a Gap
The Magnet Gap Calculator helps estimate the magnetic field strength created between two magnets separated by a small gap.
-

Gauss Guns
Build a Gauss gun with magnets and steel balls and see how magnetic attraction can accelerate and launch a ball at surprising speeds.
-

Eddy Currents
A changing magnetic field from a magnet can induce circulating electrical currents in conductive metals like aluminum and copper, creating forces that resist motion.
-
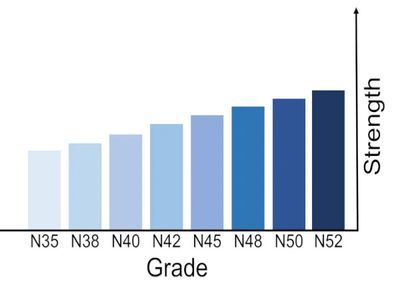
Magnet Grades
What do N grade numbers mean? How does the grade relate to the strength of a magnet? Does a magnet have a Gauss number?
-
Superconductor Levitation
See how superconductors cooled with liquid nitrogen can levitate magnets through the Meissner effect and flux pinning, creating stable magnetic levitation.
-

How to Separate Strong Magnets
Neodymium magnets are extremely strong and brittle, and separating them safely requires leverage, lateral motion, and sometimes specialized tools depending on their size and pull force.
-

Magnetic Water Treatment
Explore whether magnetic water treatment really softens hard water-and see which magnets actually make a difference in reducing scale buildup!
-

Maglev Trains
See how a simple maglev train demonstration works using repelling magnets, and why stability challenges make magnetic levitation harder than it first appears.
-

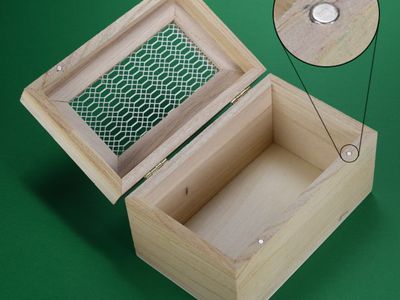
Magnetic Closures Using Adhesive Backed Magnets
How can tiny adhesive-backed magnets create clean, hidden closures for folders, boxes, and other projects in seconds?
-

Stirring with Magnetic Bars
How can a tiny magnet spin inside a sealed container and stir liquids without any moving parts entering the vessel?
-
Magnetic Forces
Why do magnets sometimes twist and rotate instead of just attracting or repelling?
-

Magnetic Signs for Cars and Vehicles
Want to mount a sign on your car with magnets? Here's how to pick the right magnets and spacing so it stays put-even at highway speeds.
-

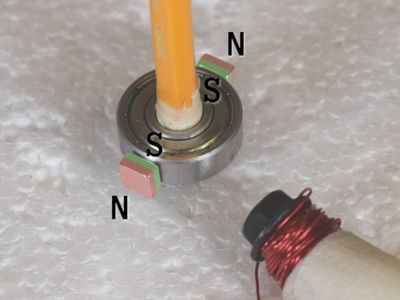
Homopolar Motors
Can a battery, wire, and magnet create a simple motor that spins on its own?
-
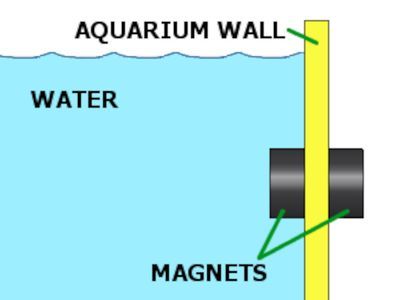
Guide to Aquarium Magnets
How can magnets hold equipment, coral, or shelves inside an aquarium without drilling holes in the tank?
-
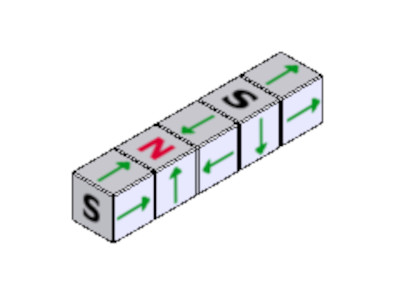
Halbach Arrays
Explore how Halbach arrays concentrate magnetic fields on one side, how to build one, and where these unique magnet configurations are used in real-world applications.
-
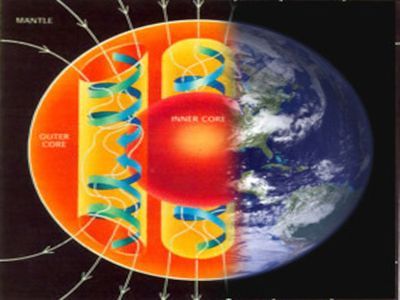
The Earth Is a Magnet
Learn how Earth acts like a giant magnet, why compasses point north, and how magnets can reveal the shape and direction of Earth's magnetic field.
-

Magnetic Spice Jars
Curious how to make spice jars stick to your fridge? Discover which magnets work best and how to build your own magnetic spice rack.
-
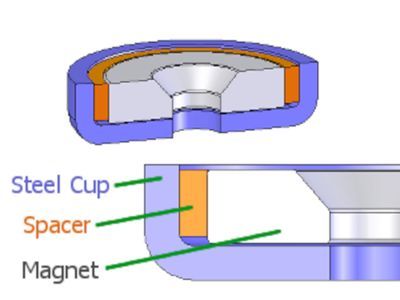
The Advantages of Mounting Magnets
Learn how mounting magnets work, why the steel cup design increases pull force, and when they're better than using a plain magnet.
-
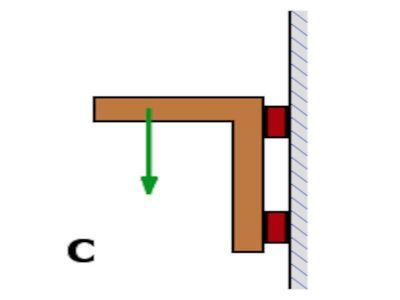
Leverage & Friction When Using Magnets
How leverage and friction affect the real holding strength of magnets used on vertical surfaces.
-

Pseudo Levitation with Magnets
Learn how to create a pseudo-levitating Mendocino motor with neodymium magnets to see magnetic levitation and motor principles in action.
-

Mendocino Motors
Curious how a magnetically levitated, solar-powered motor works? See how the Mendocino motor uses magnets, coils, and solar panels to spin with almost no friction.
-

iPhone Magnetic Measurements
Curious how your iPhone can sense magnets? Learn how smartphone magnetometers detect the Earth's field, find north, spot magnet poles, and even help estimate if a package meets air-shipping rules!
-

Strange Properties of Magnets
Explore some surprising behaviors of magnets-from stronger fields at the edges to cases where like poles can actually attract under certain conditions.
-

Does Stacking Magnets Make Them Stronger?
Learn whether repelling magnets double the force and how stacking magnets changes pull strength.
-
All About Magnetization Direction
Learn what magnetization direction means, the difference between axial and diametric magnets, and why it matters for magnet performance and sensors.
-

Fun with Magnet Fidget Toys
Magnetic fidget toys are smooth hematite magnets that snap, buzz, whistle, and slide together in satisfying ways, making them endlessly fun to play with.
-

Credit Cards and Magnetic Stripes
Learn how strong magnets affect credit cards, how close magnets can safely be to magnetic stripes, and what it takes to erase card data.
-

Magnetic Cereal
Discover how strong magnets can reveal the tiny particles of iron added to fortified breakfast cereals through a simple hands-on experiment.
-

Magnetic Bottle Opener
Learn how to use magnets behind a wall-mounted bottle opener to catch and hold falling bottle caps.
-

How to Make Your Own Magnetometer
Build your own $10 magnetometer to measure and visualize the invisible strength and direction of magnetic fields with a simple Hall Effect sensor!
-

Magnetic Grates
How do magnetic grates use stacked magnets to capture tiny metal contaminants from flowing materials?
-
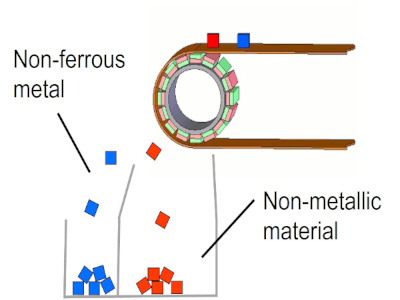
Eddy Current Magnetic Separation
Magnets can remove ferromagnetic metals like steel, while eddy currents can push conductive metals like aluminum and copper away from other materials for separation.
-

Why are Magnets Shaped like Horseshoes?
Learn why traditional magnets were shaped like horseshoes, how the design prevents demagnetization, and why modern neodymium magnets don't need this shape.
-

Emergency Magnet Separation
See how an emergency magnet separator can safely pull apart powerful magnets if someone's hand becomes trapped between them.
-

Magnets Are Everywhere
From fridge hooks to hard drives, speakers, and motors, magnets quietly power, hold, and organize nearly everything in your home.
-

Google Cardboard
See how Google Cardboard uses a simple sliding magnet and a smartphone's internal magnetometer to create a touch-free input switch for its DIY virtual reality headset.
-
How to Paint Neodymium Magnets
Learn how to paint neodymium magnets, what preparation helps paint stick to the nickel surface, and how coatings may slightly affect magnetic strength.
-

Hanging Christmas Wreaths and Decor with Magnets
Can magnets really hang a Christmas wreath on your door-and how strong do they need to be?
-
How to Choose Magnets for Dry-Erase Boards
Discover how to use the right magnets to make your whiteboard, glass board, or DIY shelf hold papers, markers, and gadgets securely without sliding or tipping!
-

Finding Studs with Magnets
Learn how to find wall studs using magnets, which magnet types work best, and how to locate studs in thicker or harder-to-detect walls.
-

Hanging Big Posters with Magnets
Learn how many magnets it takes to hang a large poster on a wall using adhesive-backed magnets without making holes.
-

Fishing Wires Through Walls with Magnets
Learn how to fish wires through walls using neodymium magnets to easily guide cables even through insulation.
-
Magnets with an OFF Switch
Learn why permanent magnets can't be switched off and how special magnetic assemblies can redirect the field to create an on/off effect.
-
Electromagnet Demonstration
Learn how to build a simple electromagnet with magnet wire and how coil turns, current, and core material affect magnetic strength.
-

Magnetic Pins and Brooches
Learn how magnetic pins and brooches work, which magnets hold best through different fabrics, and how to make your own without damaging clothing.
-

Neodymium Electric Guitar Pickups
See how K&J uses powerful neodymium magnets to build a custom electric guitar pickup from scratch, revealing the science, tricks, and surprising insights behind crafting tone-perfect pickups!
-

Magnet Fishing
Discover the thrill of magnet fishing-using powerful magnets to pull hidden metal treasures from lakes, rivers, and docks.
-

Educational Experiments with Magnets
Explore a collection of engaging classroom science demonstrations-from simple compasses and magnetic motors to levitation, electromagnets, and eddy current experiments.
-
Magnet Cannon
Explores how certain magnet arrangements can propel a magnet down a track and explains the magnetic forces behind this "magnet cannon" effect.
-

Magnet Car with AA Battery
Build a simple magnet-powered car using a battery, magnets, and aluminum foil, and see how electric current and magnetic fields create motion.
-

Making a Magnetic Light Switch
Can you hide powerful magnets behind a light switch to turn it into a simple key holder?
-

Magnetic Belt Clips
Designing a magnetic belt clip freveals why magnet strength alone isn't enough-friction, direction, and smart design matter.
-
Measuring Earthquakes with a Seismometer
A simple DIY seismometer made from a slinky, magnets, and an Arduino can detect earthquakes-and even volcanic eruptions-from thousands of miles away.
-
Remagnetizing Flexible Fridge Magnets
Learn how flexible refrigerator magnets can be re-magnetized using neodymium magnets and why alternating magnetic patterns make them stick better.
-

Using Magnets for Miniatures
Small neodymium magnets and steel balls can be used to modify tabletop miniatures, letting them tilt and pose dynamically instead of being fixed in place.
-
How to Make Magnetic Closures
Learn several ways to make magnetic cabinet closures using adhesive magnets, inset magnets, or mounting magnets for stronger holds.
-

Remagnetizing and Fixing Ceramic Magnets
Learn how to restore a weak ceramic magnet or upgrade it by replacing it with a stronger neodymium magnet for better performance.
-

Solar Powered Motors
Can sunlight, magnets, and a coil of wire really make a motor spin with no batteries at all?
-
Magnetic Couplers Powering a Boat
How can magnets spin a boat's propeller through the hull without drilling a hole in it?
-

Simple Magnetic Coil Train
How can a simple AA battery and two magnets turn a coil of copper wire into a tiny electric train?
-

Hanging with Rubber Mounting Magnets
Learn how rubber-coated mounting magnets make it easy to hang frames, decorations, and even blinds on steel surfaces without sliding or damaging them.
-
Magnets vs. Steel
Compare magnet-to-magnet and magnet-to-steel setups to understand how cost, alignment behavior, gaps, and steel thickness affect the holding strength of magnetic connections.
-
The Simplest Motor
Build one of the simplest electric motors using a battery, magnet, wire coil, and paperclips to see how basic electromagnetic forces create motion.
-

DIY: Build Your Own Seismometer
A homemade magnet-and-slinky seismometer detected earthquakes from around the world-but also picked up spiders, temperature swings, and other surprising sources of "seismic" noise.
-

Magnet Strength Side By Side
Learn how placing two magnets side-by-side affects pull force, and how spacing and pole orientation change the results.
-
Guide to Measuring Magnetic Strength
Learn why magnetometer readings can appear lower than a magnet's listed surface field and what factors affect accurate magnetic field measurements.
-
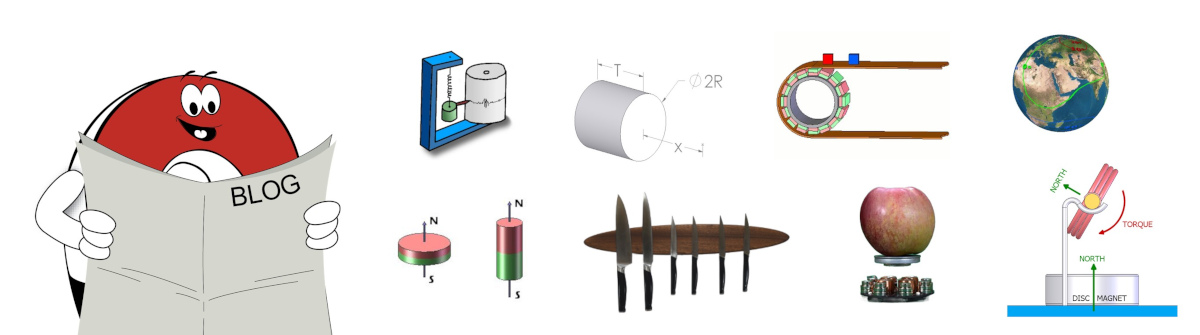
Viewing Magnetic Fields
Can you actually see the invisible patterns of a magnetic field?
-

Does Steel Block or Improve Magnetic Strength?
Does steel block a magnetic field or extend it farther?
-
Magnetic Doorstops
How strong should a magnet be to hold a door open without making it too hard to pull closed?
-

Electromagnetic Levitation
Learn how electromagnetic levitation works, why permanent magnets alone can't levitate stably, and how sensors and electromagnets make it possible.
-
Levitating Top
How can a spinning magnet top actually levitate above other magnets without flying off or snapping together?
-

Magnetic Office Decor
How can a few magnets turn ordinary office items like racks, whiteboards, and key holders into easy magnetic upgrades?
-

Breaking Magnets
Why do powerful neodymium magnets break so easily when they snap together?
-
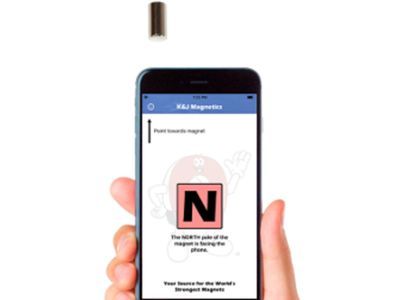
iPhone Magnet Pole Detector App
Use your iPhone's magnetic sensor to identify the north and south poles of a magnet with the free K&J Pole ID app.
-

MuMETAL
Discover when to use steel or MuMETAL to block magnetic fields and why the strongest magnets don't always need the fanciest shielding.
-

Magnet Sweeper
Build a magnetic sweeper to quickly pick up nails and metal debris, and learn how magnet size, distance, and orientation affect its performance.
-

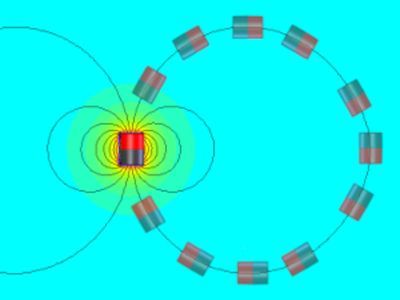
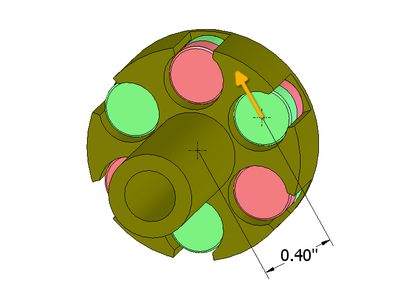
Circular Halbach Arrays
Explore how circular Halbach arrays use carefully rotated magnets to create strong, uniform magnetic fields inside a ring without requiring any electrical power.
-
Curving Bullets with a Magnet
Explore whether powerful magnets can bend a bullet's path-and why it usually doesn't work except under special conditions.
-

Making a Magnetic Koozie
Keep your drink within reach-literally-by turning a koozie into a magnetic cup holder that sticks to any metal surface!
-

Magnetic Smartphone Mount
Find out whether magnets can interfere with smartphone sensors and what to consider when using magnets to mount a phone in your car.
-

Magnetic Geocache Containers
Creative DIY geocaches you can hide with powerful magnets-logs, bolts, or even electrical boxes that stick in plain sight!
-
Brushless DC Motors
How can a few magnets, a coil of wire, and a simple sensor work together to create a spinning brushless DC motor?
-

DIY Magnetic Induction Stove - Frying Eggs with Magnets
Curious if spinning magnets can cook? Watch as a DIY Halbach array generates eddy currents to fry an egg-science you can almost eat!
-

Magnetic Spring Pogo Stick
Curious if magnets can replace a pogo stick's spring? We tested repelling neodymium magnets and found they just can't match a real spring's smooth, powerful bounce.
-
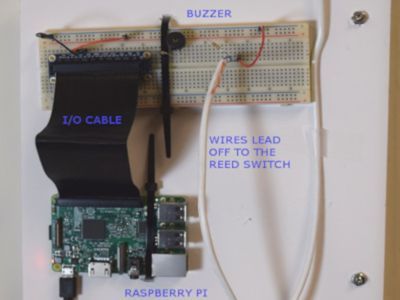
Raspberry Pi Alarm System
Can a simple magnet and reed switch turn a Raspberry Pi into a DIY door alarm?
-

3D Printed Magnetic Wind Turbine
Learn how to turn magnets and coils into a small 3D-printed wind turbine generator that lights an LED and demonstrates the principles of electricity generation.
-
Can Magnets Clean Dirty Laundry?
An experiment testing whether magnets can clean laundry found that magnets alone had no noticeable effect-detergent was still necessary to remove stains effectively.
-

Plastic Cup Microphone
See how reversing a simple magnet-and-coil speaker setup can create a DIY microphone, demonstrating how motion in a magnetic field can generate an electrical signal.
-
What are Magnetic Flux Lines?
What do those curved "flux lines" around a magnet actually represent-and what can they tell you about the magnetic field?
-

Treasure Hunting with Fishing Magnets
How can a simple magnet turn rivers, lakes, and even old wells into hidden treasure hunts?
-

Magnetic Car Window Screens for Camping
Learn how to make DIY magnetic car camping screens that keep bugs out while letting you enjoy fresh air.
-

Cheating with Magnetic Dice
Test whether magnets hidden inside dice can bias rolls and explore how external magnetic fields could influence the outcome.
-

Eddy Current Brakes
Why do magnets fall slowly near aluminum - and can we actually calculate the braking force created by eddy currents?
-

Taking Magnets on an Airplane
Learn how to safely ship strong magnets by air and see clever DIY ways to measure their magnetic field without expensive equipment!
-

Hanging with Magnetic Hooks
Learn how to hang decorations, tools, and household items using magnetic hooks on walls, ceilings, doors, glass, and more.
-
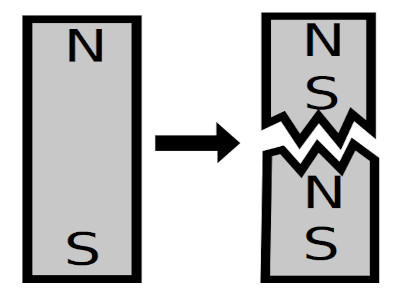
Magnetic Poles are a Myth
Explore how magnets really work by examining magnetic domains, why broken magnets still have two poles, and how precisely a magnet's magnetization direction is aligned.
-
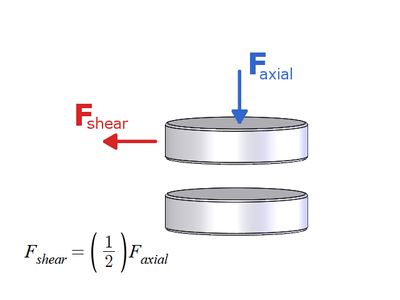
Magnet Shear Force with Doors
Explores how much force is required to slide two attracting magnets sideways and how shear force compares to their normal pull force.
-

Magnetic Money Clip
Can a pair of magnets really replace a traditional money clip-and hold your cash without wiping your credit cards?
-

Can Magnets Rust?
Rust can destroy a neodymium magnet surprisingly fast - so how well do different coatings actually protect it?
-
Is Free Energy Obtainable Using Magnets?
Can magnets really create free energy - or is perpetual motion just a physics myth?
-
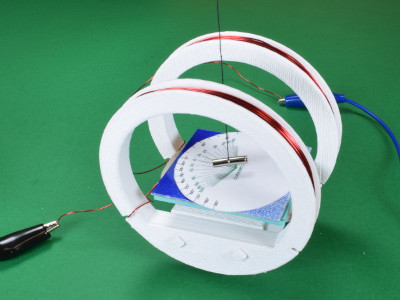
DIY Ammeter
See how magnetic fields from electric current can deflect a magnet, allowing you to build a simple DIY ammeter using coils of wire and neodymium magnets.
-

Magnetic Table Legs
Discover why using magnets to attach table legs is trickier than you think and how combining magnetic pull with clever mechanical design keeps furniture stable and safe.
-

Is Stainless Steel Magnetic?
Learn which types of stainless steel magnets will stick to and why some stainless steels are magnetic while others are not.
-
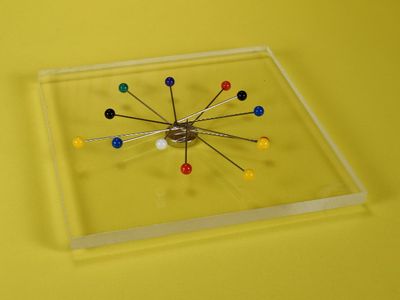
Magnetic Pincushion
Learn how different magnet shapes affect how pins gather, and how to design a magnetic pincushion that's strong enough to hold pins but easy to use.
-

Magnetic Tensegrity Table
Explore whether magnets can replace the strings in a tensegrity table and why Earnshaw's theorem prevents a stable all-magnetic version from working.
-
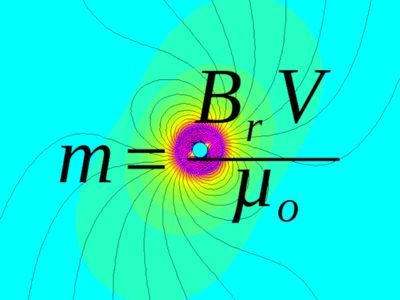
Magnetic Dipole Moment
Learn what magnetic dipole moment means, how it relates to torque in a magnetic field, and when the dipole model accurately predicts a magnet's field.
-
Red October - Magnetohydrodynamic Drives
Could a submarine really be powered by magnets and electricity with no moving parts?
-
Re-Magnetizing Refrigerator Seals
Learn how refrigerator door seals use flexible magnets, why strong neodymium magnets can damage them, and whether remagnetizing a seal is possible.
-
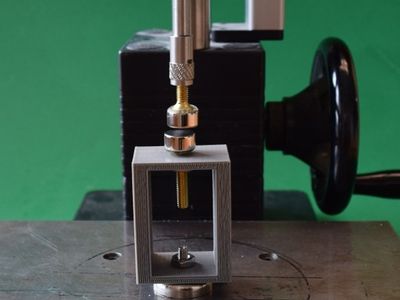
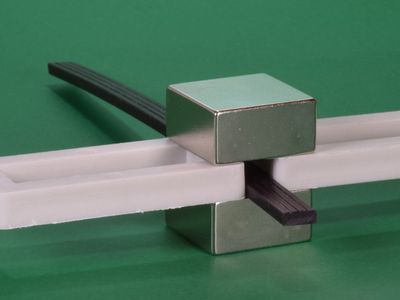
Repelling Magnet Forces
Examines whether repelling magnets exert the same force as attracting magnets and why repulsion is often slightly weaker.
-

DIY Magnetic Chess Board
Build a magnetic chess board and see how prototyping different magnet sizes helps determine the right pull force to keep pieces securely on a vertical surface.
-

Magnetic Screen Doors
Learn how to build a magnetically closing screen door and choose magnets that balance easy walkthrough with reliable closure.
-

Magnetic Locks
Learn how magnetic cabinet locks work and how a magnet key can unlock them through a door or drawer.
-

DIY Magnetic Lock
Learn how to build simple hidden magnetic locks using sliding or rotating latch designs.
-

Removable Magnetic Access Panels
What magnets are strong enough to hold an access panel-but still easy to remove when you need to open it?
-

Dent Removal with Magnets
Magnets can be a great way to remove dents from malleable surfaces, like brass. We did some experimenting to find out when this is possible, and what you can use.
-
Magnetic Gears
Using magnets to create a gear assembly
-

Turning Rocks and Crystals into Fridge Magnets
Learn how to turn rocks and crystals into stylish fridge magnets using the right neodymium magnets and friction tips.
-

How Strong are Fishing Magnets?
How strong are fishing magnets really, and what actually affects what they can pull from the water?
-

Magnetic Trains
Making our own magnetic train set, then turning it into a MagLev train set!
-

Magnetic Tool Holders
Use magnets to organize tools with DIY ideas like magnetic drawer liners, wall-mounted tool boards, and magnetic holder blocks.
-
All About Countersunk Magnets
Learn how countersunk magnets work, when to use them, and how to avoid breaking them when tightening screws.
-

Top 10 Best Uses for Magnets in Kitchen
Explore 10 smart ways to use magnets in your kitchen-from spice jars and knife holders to bottle openers and hooks that keep your kitchen organized.
-

Magnetic Mechanisms
What happens when you replace springs and counterweights with powerful magnets in catapults, Gauss guns, and other mechanisms?
-

Magnetic License Plate Holder
Discover how strong neodymium magnets can securely hold a license plate-or even a camera-without drilling a single hole in your car!
-
Neodymium Magnet Experiments and Games
A collection of simple magnet experiments and games that demonstrate interesting magnetic effects you can try at home.
-

Magnetic Hockey Game
Build your own magnetic hockey table with DIY magnets, slide pieces under the board, and turn any tabletop into a fast-paced, unplugged game!
-
Magnetic Ties and Bowties
Making a magnetic bow tie and other dress accessories!
-

Hanging Outdoor Decor with Magnets
Learn clever ways to hang banners, lights, TVs, and holiday decorations using powerful magnets-no drilling required.
-

Building a Battery-Powered Magnet Car
Build a simple battery-powered magnet car and see how electric current and magnetic fields create motion.
-

Cosplay with Magnets
How can magnets be hidden in costumes to hold shields, swords, and other props securely in place?
-

Uses for Countersunk Magnets
Discover how countersunk magnets are used to securely mount magnets with screws for projects like tool holders, cabinet latches, removable panels, and DIY builds.
-

Neodymium vs Ceramic Magnets
Ceramic or neodymium magnets - which one actually performs better for real-world applications?
-

Top Ways to Get Organized with Magnets
Magnet hacks to organize your home, office, and safely store your neodymium collection.
-
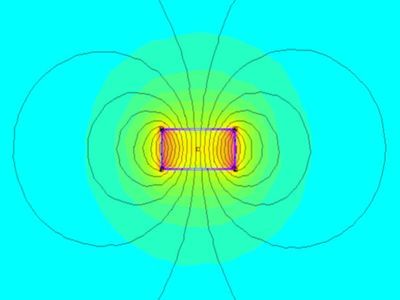
Magnetic Fields
Explores the basics of magnetic fields and shows how different environments and magnet arrangements change their shape and strength.
-

Practical Uses of Magnetic Thumbtacks
See how magnetic thumbtacks can transform your home or office, holding papers, posters, and even serving as a stud finder, all without damaging surfaces!
-

Benefits of Plastic & Rubber Coated Magnets
Learn why plastic and rubber coated magnets are useful for corrosion resistance, durability, surface protection, and improved grip in real-world applications.
-

How to Rubber Coat Your Own Magnets
Learn how to rubber coat your own neodymium magnets with this simple DIY guide using Plasti-Dip for added protection, grip, and durability.
-

What Magnet Coating Should I Use?
Find the best magnet coating for your application.
-

Build Your Own Magnet Separator
Build a simple magnet separator tool with basic materials to safely separate strong neodymium magnets.
-

Magnetic Fuel Treatment
Do magnets clamped around a fuel line actually improve gas mileage-or is it just a myth?
-

The Earth's Magnetic Field
Explore how Earth's magnetic field bends, tilts, and flows across the globe with interactive 3D visualizations showing intensity, declination, inclination, and northward field lines!
-

The History of Neodymium Magnets
How did we go from naturally magnetic rocks to the powerful neodymium magnets used in modern technology today?
-

Making & Repairing Fridge Magnets
Learn how to make your own fridge magnets DIY and also avoid common mistakes to increase magnet strength.
-

Choosing the Best Fridge Magnets
Find the best fridge magnets for photos, lists, or decor without scratches. Top mistakes to avoid when using fridge magnets.
-

What is Magnetic Separation?
What is magnetic separation and where is it used? See how magnets remove metal contaminants in food, recycling, mining & more.
-
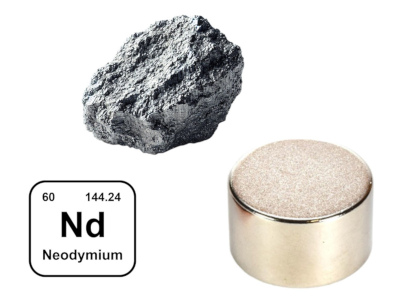
What Are Neodymium Magnets?
What is neodymium and why is it used in the world's strongest magnets? Explore the history, grades, and surprising uses of neodymium magnets.
-

Testing Magnet Strength
Learn how magnets are tested, the best testing conditions and what pull force 1, 2, 3 and 4 mean.
-
Why Do Magnets Lose Strength?
Do magnets get weaker over time? Why doesn't my magnet stick anymore?
-
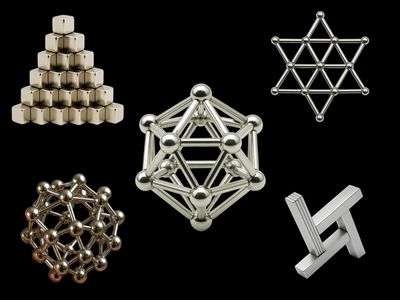
Making Magnetic Art Sculptures
DIY guide to making cool magnetic art sculptures with neodymium magnets
-

The Ultimate Guide to the Best Magnetic Hooks for Cruise Ship Cabins
Complete guide to magnetic cruise hooks: best types, uses, installation, removal, safety tips, and FAQs.












































































































































































Recent Articles
-
The Ultimate Guide to the Best Magnetic Hooks for Cruise Ship Cabins
Complete guide to magnetic cruise hooks: best types, uses, installation, removal, safety tips, and FAQs.
-
Making Magnetic Art Sculptures
DIY guide to making cool magnetic art sculptures with neodymium magnets
-
Why Do Magnets Lose Strength?
Do magnets get weaker over time? Why doesn't my magnet stick anymore?
-
Testing Magnet Strength
Learn how magnets are tested, the best testing conditions and what pull force 1, 2, 3 and 4 mean.
Trending Articles
-
Magnetic Knife Holder
Learn how to build a magnetic knife holder using neodymium magnets, including magnet sizing, wood thickness considerations, and step-by-step construction tips.
-
Hanging Outdoor Decor with Magnets
Learn clever ways to hang banners, lights, TVs, and holiday decorations using powerful magnets-no drilling required.
-
How to Rubber Coat Your Own Magnets
Learn how to rubber coat your own neodymium magnets with this simple DIY guide using Plasti-Dip for added protection, grip, and durability.
-
Top 10 Best Uses for Magnets in Kitchen
Explore 10 smart ways to use magnets in your kitchen-from spice jars and knife holders to bottle openers and hooks that keep your kitchen organized.